2024 우수잡지


-MPLAB Software Updates-KR 466x58H.jpg)


드론 모터 제어기 개발

글/Digi-Key 유럽 편집자
2050년이 되면 세계 인구는 100억 명에 달할 것으로 예상된다. UN 식량 농업 기구(FAO)에서 발간한 2017 Future of Food & Agriculture 보고서에 따르면 충분한 식량을 공급하기 위해서는 농업 생산량이 50%나 증가해야 한다.
UN FAO는 전 세계 식량 공급을 해결하는 데 필요한 몇 가지 과제를 지적했다. 여기에는 농촌 지역의 발전, 식량 체계 개선 및 농업 생산성 향상이 포함된다. 이러한 과제를 해결하는 데는 첨단 기술이 큰 역할을 한다. 스마트 농업이 수확량 증가 및 가축 관리를 지원하는 수단으로 부상하고 있다. 한 가지 예는 사물 인터넷(IoT) 기술을 사용하여 작물 수확량 및 가축 건강을 개선하는 것이다.
작물 높이, 재배 밀도, 잎 상태 또는 가축 온도 등의 데이터를 수집하면 농장주가 작물 또는 가축 관리를 최적화하고 생산량을 예측 및 최대화할 수 있다. 데이터가 분석된 후에는 농장주가 수집된 정보를 기반으로 내려진 의사 결정을 확대할 효과적인 방법이 필요하다. 여기서 주된 문제는 농장이 수천 에이커에 달하는 넓은 규모일 수 있다는 점이다. 따라서 농작물이나 가축을 검사하는 데 매우 많은 시간이 걸릴 수 있다. 또한 농작물이나 가축의 전체적인 건강 상태를 파악하고, 특정 위치의 재배 밀도 저하, 특정 지역의 해충 또는 건조도 등을 확인하기도 매우 어려울 수 있다.
이러한 문제의 해결에 드론이 큰 도움이 된다. 이미 기술 기업들은 농장주가 드론을 사용하여 넓은 지역을 빠르게 조사하고 보이거나 보이지 않는 파장으로 심층적인 정보를 수집할 수 있는 방법을 찾고 있다(그림 1). 무인 항공기(UAV)의 도움을 받는 정밀 농업 역시 전문가들이 UAV 비행 중 수집된 데이터를 해석하여 적절한 대응을 결정하기 위한 클라우드 기반 분석 도구를 개발할 기회를 마련해 주고 있다. 이를 통해 농장주는 관개, 수정, 해충 관리를 최적화하여 생산량을 높이고 농약을 더 효과적으로 사용하여 비용을 절감할 수 있다.
-1")
[그림 1] 항공 이미지의 클라우드 분석은 농작물과 토양 조건을 모니터하는 데 도움이 된다. (이미지 출처: PrecisionHawk)
농업용 UAV는 데이터 수집 역할만 하는 것은 아니다. 다중 로터 UAV는 10kg, 20kg 또는 그 이상의 하중을 운반할 수 있으므로 트랙터나 경비행기를 이용하는 일반적인 분무 작업에 비해 몇 가지 장점이 있다. UAV 조종사의 교육은 항공기 조종사에 비해 시간과 비용이 훨씬 적게 소요되며 기기 구입 및 운영 비용이 훨씬 저렴하다. 농업용 분무 UAV는 트랙터보다 작업 속도가 더 빠르며 농작물을 손상시키지 않는다. 또한 땅이 비에 잠긴 경우에도 비행이 가능하다.
정밀 농업을 위한 UAV 기술
정밀 농업용 UAV의 제조사는 대체로 신생 기업으로 계속 발전 중이며 규제 역시 아직 완비되지 않았다. FAA (미국 연방항공국)에서 개인 기준으로 허가할 수는 있지만 현재로서는 상업적 UAV 비행이 허용되지 않는다.
적절한 항공기에 필요한 기술로는, UAV 기술에 관련해서는 기본적인 모터와 비행 제어, 센서, 원격 통신이 필요하고 분무에 관련해서는 밸브 액추에이터 및 액체 높이 감지 등의 시스템이 필요하다. 레이더 기반 충돌 회피 역시 제안되고 있다.
데이터 수집의 경우 가벼운 저전력 분광 센서는 가시 분광에서 작동하는 일반 카메라에 비해 농작물 상태에 대한 더 많은 정보를 제공할 수 있다. 분광 센서는 위성 응용 분야에서 처음 입증된 분광 분석 기술에 기반을 두고 있다. 이러한 센서는 각각 초근거리 적외선(VNIR, 380~1000nm), 근거리 적외선(NIR, 900~1700nm) 또는 단파장 적외선(SWIR, 950~2500nm)과 같은 좁은 대역 내에서 작동하도록 조정된 검출기 모음을 사용하여 가시 분광을 넘어선 파장에서 데이터를 캡처한다. 이러한 파장에서는 농작물 질병 또는 기타 해충의 화학적 시그니처를 가시 분광보다 더 명확하게 관찰할 수 있다. 현재 낮은 왜곡, 넓은 시야 및 노이즈를 제거하고 캡처된 이미지의 정확도를 보장하는 온보드 처리 기능을 갖춘 비교적 저렴한 분광 센서가 출시되고 있다.
비행
정밀 농업을 위한 UAV는 소형 고정 날개 항공기부터 다중 로터 쿼드콥터 드론 유형 플랫폼까지 다양한다. 분무용 UAV에는 기대 하중에 따라 6개 또는 그 이상의 로터가 장착될 수 있다.
드론 형식 UAV의 리프트 로터 구동용 DC 모터는 브러시 또는 브러시리스(BLDC) 유형이 사용된다. 소형 기체에는 무게를 줄이고 단순성을 높이기 위해 브러시 모터를 사용하기도 하지만, 특히 크기가 큰 UAV의 경우 더 높은 신뢰성과 낮은 전자기 잡음 때문에 BLDC를 사용한다.
기체의 코어 부분에는 이동을 처리하고, 이륙을 위한 모터를 제어하고, 비행 중 높이와 방향을 유지하기 위한 비행 컨트롤러가 필요하다. 3축 가속도계, 3축 자이로스코프 및 기압계 압력 센서와 같은 경량의 소형 MEMS 센서 및 GPS 기반 유도를 통해 정확한 위치 이동, 동작 제어 및 고도 인식이 가능하다. 비행 중 안정성 유지의 측면에서는, 오늘날 다중 로터 UAV에 사용되는 비행 컨트롤러는 토크 방지 테일 로터를 제어하여 기체가 자체 축을 따라 회전하는 것을 방지하는 모델 헬리콥터 제어기의 특성을 공유한다. UAV 컨트롤러에서 MEMS 센서 퓨전 기반 관성 측정은 개별 모터 속도의 조정을 조율하여 기체를 원하는 방향으로 고정시킨다.
정밀 농업을 가능하게 해주는 도구의 하나인 이 비행 컨트롤러의 진정한 힘은 UAV의 비행 계획을 정의하는 데 도움을 주는 기능과 사용자 인터페이스에 있다. 농장주는 특정 면적의 전체 이미지를 캡처하거나 최소의 시간과 노력을 들여 과다 분무 없이 전체 면적을 고르게 분무하기 위해 UAV가 비행해야 하는 경로를 사전에 정확하게 결정해야 한다.
모터 제어기 개발 촉진
모터 구동의 개발을 단순화하기 위해 여러 제조업체에서 여러 평가 키트를 제공한다. 홀 센서를 사용하는 자속 기준 제어(FOC) 또는 로터 위치 감지용 백-EMF 측정과 같은 제어 알고리즘을 일반적으로 무료로 사용할 수 있다. 응용 제품 개발의 시작점이 될 수 있는 예제 소프트웨어가 제공되므로 엔지니어가 다양한 종류의 모터를 빠르게 개발하는 데 도움이 된다.
하지만 이러한 키트의 도움이 있더라도 엔지니어는 속도 및 토크를 정확하게 제어할 수 있는 모터의 설계에 대한 전문성을 갖춰야 한다. 선택한 모터에 대한 소프트웨어를 설정하고 속도 및 토크 명령에 대한 응답을 최적화하기 위한 파라미터의 미세 조정 등이 까다로울 수 있다. 엔지니어는 모터의 전압 상수(Ke), 마찰 계수 및 관성 모멘트를 찾아야 한다. 컨트롤러에서 백-EMF 측정을 사용하는 경우에는 무센서 상태 관찰 및 속도 조정을 설정해야 한다. 최근에는 TI 및 STMicroelectronics 등의 공급업체가 모터 특성화 및 튜닝을 성공적으로 단순화하여 개발자가 모터 특성을 사전 파악하지 않고도 모터를 구동할 수 있다. 이 두 제조업체는 제조 방식이 서로 약간 다르다.
ST는 MC Workbench 모터 제어기 개발 환경에 식별 및 튜닝 기능을 내장했다(그림 2). 이 모터 프로파일러는 각각 완료에 몇 초 정도가 걸리는 정적 개방 및 폐쇄 루프 테스트를 사용하여 모터 파라미터를 자동으로 감지한다. 전력 스테이지, 구동기 및 제어 스테이지를 기술하는 다른 파라미터는 MC Workbench GUI를 통해 입력된다. 그런 다음 프로젝트가 생성 및 컴파일되어 모터를 회전하고 제어할 수 있다. 그리고 MC Workbench 원터치 튜닝 기능은 부드러운 속도 및 토크 제어를 위해 설정을 조정하는 간편한 방법을 제공한다.
-2")
[그림 2] ST의 MC Workbench. 모터 프로파일러는 알려지지 않은 모터 파라미터를 캡처한다.
MC Workbench에 이 기능이 구현되었기 때문에 개발자는 다양한 STM32 MCU 등의 여러 마이크로 컨트롤러 중에서 선택하고 STM32 에코시스템을 사용하여 저비용 개발 플랫폼을 만들 수 있다. 이와는 다른 방법으로 ST는 최근 STSPIN32F0을 소개했다. 샘플 패키지에 완전한 STM32F0 마이크로 컨트롤러가 3상 하프브리지 게이트 드라이버로 통합되었으며 과전류/과전압/과온 방지 기능과 홀 센서 디코딩용 연산 증폭기가 내장되었다. STSW-STM32100 모터 제어기 라이브러리와 함께 사용하는 STEVAL-SPIN3201 평가 기판에는 STSPIN32F0 IC가 전력 관리 기능으로 결합되어 있다. 펌웨어 예제인 STSW-SPIN3201은 다운로드하여 MC Workbench와 함께 사용하여 신속하게 모터를 구동하고 개발을 시작할 수 있다.
TI의 접근법은 TMS320F28069M과 같은 C2000 Piccolo™ 계열 장치 등의 마이크로 컨트롤러의 ROM에 자사의 InstaSPIN™-MOTION 소프트웨어 솔루션을 통합하는 방식을 기반으로 한다. InstaSPIN-MOTION에는 TI의 FAST™(Flux, Angle, Speed, Torque) 소프트웨어 기반 로터 플럭스 센서가 포함된다. 모터 프로파일링, 단일 파라미터 튜닝 및 모터 유형을 식별하기 위한 외란 차단용 부품도 포함되어 있다(그림 3).
-3")
[그림 3] TI의 InstaSPIN-MOTION은 마이크로 컨트롤러에 포함된 펌웨어를 사용하여 모터를 특성화한다.
개발자는 TI의 MotorWare™ 소프트웨어 환경을 통해 InstaSPIN-MOTION의 기능을 실습할 수 있다. DRV8312-69M-KIT에는 TMS320F28069M이 포함된 제어 기판과 DRV8312 IC(브러시리스 DC 모터 구동에 필요한 회로가 포함된 3상 인버터)가 포함된 전원 모듈 기판이 결합되어 있다. 55W 모터도 제공된다.
결론
정밀 농업은 드론 기술의 또 다른 흥미로운 기회이다. 비용 효율적인 방법으로 생산을 최적화해야 하는 과제 때문에 이 분야의 발전은 꼭 필요하다. 비행 프로그래밍을 단순화하고 캡처된 데이터를 해석하기 위한 소프트웨어와 기존의 모터 제어기 전문 기술을 활용하여 안정적이고 제어 가능한 기체를 신속하게 제작하는 것이 성공의 열쇠이다.





 |






 |
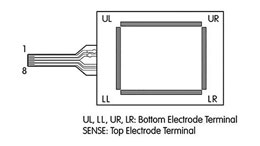
안정적인 터치스크린을 빠르게 구현하는 방법
조회수 101회 / Steven Keeping
Bluetooth 5.3을 Edge IoT 설계에 빠르고 비용 효율적으로 추가하는 방법
조회수 231회 /

적절한 안전 컨트롤러 선택의 복잡성 해결
조회수 84회 / Jeff Shepard
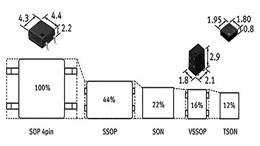
반도체 자동화 테스트 장비에 SSR을 사용하는 방법
조회수 91회 / Jens Wallmann
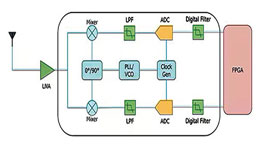
항공 우주 및 방위 산업의 적응형 SDR 통신 시스템에서 민첩한 RF 트랜...
조회수 354회 / Stephen Evanczuk
10BASE-T1L을 통한 건물 자동화 혁신
조회수 189회 / Rolf Horn

다기능 전원 공급 장치를 사용하여 지능형 화재 안전 및 보안 시스템 신...
조회수 330회 / Art Pini

전력 소자 구동기의 선택 및 시작하는 방법
조회수 543회 / Bill Schweber
DSC와 MCU를 사용하여 내장형 시스템 보안을 보장하는 방법
조회수 542회 / Stephen Evanczuk
PDF 다운로드
 |
회원 정보 수정