2024 우수잡지


-MPLAB Software Updates-KR 466x58H.jpg)


더욱 효율적인 스마트 장치 구축 ①- MCU 및 PMIC를 통한 저전력 설계

글/Digi-Key 북미 편집자 제공
무선 IoT 및 웨어러블 전자 제품은 연장된 배터리 수명을 제공할 수 있는 저전력 설계를 사용한다. 하지만 빠듯한 전력 예산으로 인해 개발자들에게 대형 배터리와 사용자에게 번거로울 수 있는 재충전 요구 사항으로 전환하도록 강요할 수 있는 더 많은 기능을 요구하는 발생한다. 처리와 전력 관리 모두에 더욱 신중한 방법을 제공하는 솔루션이 필요하다.
이러한 솔루션은 설계자가 점점 더 까다로운 사용자 기대치를 충족하는 데 도움을 주어야 한다. 예를 들면 사용자는 스마트 제품의 새 버전은 안전성과 신뢰성이 이전 버전만큼은 될 것으로 기대한다. 어떤 사용자도 스마트 자물쇠가 전력이 부족하여 도어 잠금이 해제된 상태로 남아 있을 것이라고 예상하지는 않는다. 또한 이전 제품과 비슷한 외관을 가진 스마트 제품을 기대하지 않는다. 예를 들면 기존의 손목 웨어러블보다 크기나 부피가 아주 큰 스마트워치는 외면 당할 가능성이 크다.
여기서 중요한 점은 사용자는 스마트 장치가 구입, 설치 및 사용을 보장하는 수준의 가치를 돌려줄 것을 기대한다는 것이다. 궁극적으로 사용자는 스마트 제품이 기존 제품에서 제공되는 상호 작용과 외형은 유지하면서, 사용자에게 중요한 서비스를 전달하는 보이지 않는 인텔리전스를 제공할 것이라고 기대한다.
이러한 모든 기대가 제품 기능, 폼 팩터 및 전력 소비에 부담을 준다. 기능 요구 사항으로 인해 MCU와 전력 관리 기능이 전력 예산을 가장 많이 차지하는 경우가 많다. 하지만 고급 MCU 및 PMIC를 사용하면 개발자가 설계 규모 및 사용 편의성을 유지하면서 전력 및 성능에 대한 더 많은 요구 사항을 충족할 수 있다.
설계 과제
엔지니어에게 있어 보이지 않는 인텔리전스가 있는 스마트한 설계를 만들고자 할 때 전력 요구 사항과 전력 가용성 간의 충돌은 더욱 부각된다. 엔지니어는 경쟁력 있는 제품을 제공하기 위해 다양한 기능이 내장된 시스템을 구축하고, 더 많은 센서를 통합하고, 더 복잡한 알고리즘을 실행하게 된다. 동시에 이러한 시스템은 배터리로 전력을 공급받으면서 가능한 최소 실장 면적을 유지해야 한다. 일반적으로 IoT 장치와 웨어러블에 사용되는 동전형 전지 배터리는 IoT 장치 또는 웨어러블에 있어 물리적인 부피를 크게 자체하지 않으면서 수십 또는 수백 밀리암페어 시간으로 제한된 정전 용량을 제공한다. 그런데도 사용자는 기존의 대안과 일치하는 설계에서 충전 간 배터리 성능이 며칠씩 지속되기를 기대한다.
이러한 다양한 요구 사항을 충족하려면 기능을 저하시키지 않으면서 전력 소비를 최소화하는 기기를 사용해야 한다. 실제로 스마트 제품 설계의 전력/성능은 설계의 중심이 되는 MCU 기능을 밀접하게 반영한다. 그러나 어떤 MCU가 적합한지는 몇 가지 규격서 사양으로는 거의 측정할 수 없다. 업계가 수년간 전류 소비에 중점을 두어 왔지만 μA/MHz로 나타낸 MCU의 현재 사양은 전체 중 일부만을 나타낸다. 실제 전력 소비는 가장 효과적인 파라미터이므로 낮은 μA/MHz 및 공급 전압의 조합이 실제 응용 분야에서 중요한 측정값이 된다.
궁극적으로 MCU 사양에 가장 근접한 검사도 각 응용 제품의 특정 요구에 응해야 한다. 예를 들어 센서 측정을 간헐적으로만 업데이트해야 하는 응용 제품은 MCU 듀티 사이클을 감소시키므로 유효 전력이 가장 중요한 사양이 아닐 수도 있다. 듀티 사이클이 전체 활성 모드로 연속해서 실행되지 않고 감소되면 MCU가 저전력 절전 상태에서 더 많은 시간을 보낼 수 있음을 의미한다. 따라서 절전 상태의 전력 소비, 절전 해제 시간 및 SRAM 전력 보유가 중요한 파라미터로 부상한다. 대용량 메모리 어레이 및 여러 주변 소자와 같은 MCU 기능은 이러한 MCU 요소에도 통합되어 있다.
통합 메모리가 더 크면 증가하는 대형 소프트웨어 기반 지원 외에도 외부 장치에 대한 오프칩 액세스와 관련된 전력 소비 및 성능 지연을 실제로 줄이는 데 도움이 된다. 동시에 개발자는 MCU의 전력 관리 기능 및 데이터 보존 기능을 이용하여 프로세서 코어 자체가 절전 모드에 있는 동안 전력을 최적화하고 상태를 유지할 수 있다.
고급 MCU의 전력 관리 기능은 주변 소자 옵션의 전력을 절감하는 데 상당한 이점을 제공한다. 이러한 MCU에 내장된 복잡한 전력 관리자는 주변 소자를 선택적으로 활성화하거나 비활성화할 수 있고 MCU에서 연속된 주변 소자 작동을 허용함으로써 ‘슬립워크’를 가능하게 한다. 여기서 주변 소자를 포함한 작동은 MCU가 절전 상태를 유지하는 동안 진행할 수 있다.
이전에는 개발자가 직접 전력 소비와 기능에 기여한 여러 요소 간에 트레이드 오프를 강제로 적용해야 했다. 그에 반해서 Maxim Integrated Darwin MCU 제품군은 웨어러블 및 기타 저전력 설계에 늘어나는 과제를 충족하기 위해 필요한 기능을 제공한다.
전력과 성능 균형 유지
IoT 설계 요구 사항을 충족하도록 특별히 설계된 Darwin MCU 제품군은 Maxim MAX32620, MAX32625 및 MAX32630을 포함한 다양한 장치로 구성된다. 부동 소수점 처리 장치를 사용하여 ArmⓇ CortexⓇ M4를 중심으로 제작된 Darwin MCU는 주변 소자, 클록, 실시간 클록(RTC), 감시 타이머 등을 결합한 다양한 하드웨어 토대를 공유한다.
이들의 차이점 중 하나는 Darwin MCU는 단일 칩 플래시 및 SRAM에 대한 다양한 옵션을 제공한다는 점이다. MAX32620과 MAX32630은 2MB 플래시를 통합하지만 MAX32625는 512KB 플래시를 제공한다. 개발자가 MAX32630에서 512KB, MAX32620에서 256KB, MAX32625에서 160KB 등 지원되는 단일 칩 SRAM도 다양하게 이용할 수 있다.
또한 이 장치는 전체 활성 모드에서 최소 전류를 사용하는 기능을 공유한다(102A(마이크로암페어)/MHz(MAX32620), 106A/MHz(MAX32625) 및 106A/MHz(MAX32630)). 앞에서 언급했듯이 전력은 중요한 사양이므로 이러한 장치는 코어에 1.2V의 저전압 작동을 사용하고 I/O에 1.8~3.3V를 사용한다. 따라서 전력 소비는 전체 활성 모드에서 매우 낮게 유지된다. 저전압 작동은 개발자가 해당 응용 분야에서 낮은 전력 소비를 최적화할 수 있는 여러 메커니즘에서 지원된다.
전력 소비를 최소화하는 기능은 배터리 구동식 장치의 장기적인 작동에도 중요하다. 대부분의 응용 분야에서 전력 최소화 기능은 응답 시간에 영향을 주지 않고 듀티 사이클을 최소화함을 의미한다. 개발자의 경우 이처럼 상충하는 요구 사항으로 인해 Darwin MCU 저전력 모드에서 해결 방법을 찾는다.
MCU의 최저 전력 상태인 LP0는 파워 시퀀서, 파워온 리셋, 전압 공급 모니터, RTC(사용하는 경우) 및 데이터 보존 레지스터와 연결된 회로를 제외한 모든 장치 회로망을 비활성화하는 정적 상태에 장치를 둔다. LP1은 전력을 SRAM 및 레지스터로 유지하는 동안 CPU를 절전 모드로 유지하는 저전력 대기 모드를 제공한다. LP0와 LP1에서 CPU 코어 자체는 인터럽트로 인해 전력이 공급될 때까지 정적 상태로 유지된다.
세 번째 전력 모드인 LP2는 코어를 절전 상태로 유지하지만 아래 설명된 대로 MCU 주변 장치를 작동하는 데 중요한 메커니즘을 제공한다. 마지막으로 LP3는 프로세서와 주변 장치가 구동되고 선택한 클록 속도로 작동하는 정상 실행 상태이다.
LP2는 LP3에 비해 상당한 전력 절감 효과를 제공한다(그림 1). 설계자가 클록 속도를 정격 96MHz에서 4MHz로 줄여서 전력을 크게 절감할 수도 있다(오른쪽 그림 1 참조). 무엇보다도 아래 자세히 설명된 대로 주요 주변 소자의 기능 손실 없이도 전력 절감 효과를 누릴 수 있다.
-1")
[그림 1] Darwin MCU 전력 에코시스템을 이용하면 정격 96MHz(왼쪽)에서 4MHz(오른쪽)로 클록 속도를 줄여 전력을 크게 절감하면서 개발자가 완전히 활성화된 LP3 모드에서 LP2 모드로 이동할 때 전력을 크게 줄일 수 있다. (이미지 출처: Maxim Integrated)
내부적으로 Darwin MCU의 다른 전력 모드는 복잡한 기능 요소 세트를 사용한다. 예를 들면 LP0와 LP1 중에 전력 시퀀서가 MCU를 효율적으로 제어한다. 동시에 단일 칩 타이머, 장치 주변 소자, GPIO 핀 또는 장치의 내장된 공급 전압 모니터의 인터럽트가 시스템 재시작(또는 공급 전압 실패 시 장치 초기화)을 트리거할 수 있다. 하지만 이러한 잠재된 복잡성에도 불구하고 개발자에게는 간단한 전력 모드 작동 모델이 된다.
일반 응용 제품에서 개발자는 RTC 타임아웃 또는 인터럽트가 발생할 때까지 MCU를 프로그래밍 방식으로 저전력 모드에 배치할 수 있다(그림 2).
-2")
[그림 2] LP2의 주변 소자 관리 장치(PMU)는 주변 소자와 메모리 간에 데이터를 이동하는 동안 MCU를 절전 모드로 전환할 수 있게 하여 전력을 절감한다. (이미지 출처: Maxim Integrated)
개발자가 LP0 및 LP1 모드를 사용하여 최저 전력 상태를 달성할 수 있더라도 LP2는 CPU 코어가 절전 모드를 유지하는 동안 주변 소자 기능을 지원하는 유연성을 제공한다. 이 기능의 핵심은 장치의 주변 소자 관리 장치(PMU)에 있다.
주변 소자 관리
Darwin MCU PMU는 그 자체로 지능형 제어 서브 시스템이다. 이 직접 메모리 액세스(DMA) 기반 장치는 6개의 독립적인 채널에 라운드 로빈 일정을 제공하여 CPU와 관계없이 여러 주변 소자의 작동을 허용한다. PMU는 해당 DMA 기능을 사용하여 주변 소자와 메모리 간에 데이터를 이동하고, 펄스 트레인 신호, 아날로그 측정 및 기타 이벤트를 동기화할 수 있다. LP2에서 PMU 모드라고도 하는 PMU는 코어가 절전 모드를 유지하는 동안 주변 소자 작동을 지원하도록 해당 상태 신호 발생기를 사용하여 장치를 제어한다.
개발자는 적절한 레지스터를 설정하여 기능과 전력 소비 간 균형을 미세하게 제어할 수 있다. 실제로 개발자는 LP3에서 주변 소자 작동을 통해 동일한 제어를 실현할 수 있다. PMU는 LP2에서 사용할 때 저전력 작동을 가능하게 하지만 LP3에서 사용하면 주변 소자가 프로세서의 부담을 가중하는 작동을 처리할 수 있게 함으로써 프로세서 부하를 줄인다. 두 경우 모두 개발자가 장치에서 개별 블록을 프로그래밍 방식으로 활성화하거나 비활성화할 수 있다(그림 3).
-3")
[그림 3] PMU는 작동하는 동안 전력 절감을 위해 장치에서 개별 블록을 활성화하거나 비활성화하는 데 사용할 수 있다. (이미지 출처: Maxim Integrated)
개발자는 개별 기능 블록을 미세하게 제어함으로써 전반적인 전력 소비를 제어하는 32비트 레지스터 3개, 즉 CLKMAN_CLK_GATE_CTRLn(n=0, 1, 2)을 사용하여 블록 활성화를 프로그래밍할 수 있다. 실제로 개발자는 이러한 컨트롤을 직접 구현하거나 MCU의 동적 클록 게이팅 회로망을 사용하여 주변 소자를 자동으로 활성화하거나 비활성화할 수 있다.
예를 들면 Darwin MCU 아키텍처는 XIP(eXecute In Place) 작동 중에 특별히 외부 플래시와 CPU 간의 인터페이스 역할을 하도록 SPI 마스터를 지원한다. SPIX(SPI XIP) 작동이 비활성 상태일 때마다 MCU의 동적 클록 게이팅 메커니즘은 SPIX 주변 소자를 자동으로 비활성화한다. 개발자는 CLKMAN_CLK_GATE_CTRL0 레지스터에서 비트 21:20을 사용하여 이 동작을 제어할 수 있다. 비트 21을 ‘1’로 설정하여 SPIX 클록을 항상 활성 상태로 유지하거나, 비트 20을 ‘1’로 설정하여 동적 클록 게이팅을 활성화하거나, 두 비트를 ‘0’으로 설정하여 SPIX 클록을 전부 강제로 비활성화할 수 있다.
단일 칩 아날로그 디지털 컨버터(ADC)와 같은 모듈의 경우 개발자가 주변 소자에 대한 전력을 명확히 제어할 수도 있다. 예를 들어 ADC를 사용하려면 개발자가 먼저 CLKMAN_CLK_GATE_CTRL2에서 비트 12를 ‘1’로 설정하여 클록 게이팅을 ADC로 설정하고, 인터페이스를 활성화하도록 비트를 설정한 다음, ADC_CTRL 레지스터에서 비트 1을 설정하여 ADC 전원을 켠다. ADC를 독립적으로 작동하는 이 기능은 특히 LP2(PMU 모드)에서 효과적이다. 프로세서 코어가 LP2에서 절전 모드에 있기 때문에 잡음 플로어가 최저 레벨에 있으므로 개발자가 민감한 아날로그 신호를 취득할 수 있다.
다른 ADC 기능을 사용하여 개발자가 CPU 듀티 사이클을 최소로 줄일 수 있다. 개발자는 ADC 샘플에 대한 상한 및 하한을 프로그래밍 방식으로 설정하여 샘플이 원하는 윈도우 값으로 떨어지는 경우에만 CPU를 깨우는 인터럽트를 생성할 수 있다. 개발자는 측정된 샘플의 중요한 변화에 있어서 센서를 폴링하기 위해 CPU를 정기적으로 깨우지 않고 이 기능을 사용하여 샘플링된 센서 데이터에서 중요한 변화가 발생할 때까지 CPU를 절전 모드로 유지할 수 있다.
데이터 취득을 위해 ADC는 내부 10비트 시그마 델타 컨버터에 멀티플렉싱된 4개의 외부 아날로그 입력을 지원한다. 입력 채널 중 2개에 대해서는 전압 분배기를 사용하여 개발자가 입력 신호를 5배로 줄일 수 있다.
그렇지만 아날로그 신호를 증폭하거나 단순히 버퍼링하기 위해 개발자가 종종 외부 신호 조정을 해야 한다. 이 경우 설계가 Maxim Integrated의 nanoPower 제품군에 속한 저전력 아날로그 장치 구성품을 사용하여 저전력 작동을 유지할 수 있다. 예를 들면 Maxim MAX40007 nanoPower 연산 증폭기는 700nA(나노암페어)(TYP)를 소비하는 동안 110dB 대량 신호 전압 이득(3V VDD)을 다룬다. 이 연산 증폭기는 정전 용량 부하를 최대 20pF(피코패럿)까지 구동할 수 있다. 비교하자면 Darwin ADC의 접지 정전 용량은 1pF이고 Darwin ADC의 동적으로 전환된 정전 용량은 250nF(나노 패럿)이다.
MAX40007과 같은 NanoPower 장치는 특히 Darwin MCU를 기반으로 한 설계에 효과적이다. 개발자는 MCU에 전력을 공급하는 데 사용된 레일과 동일한 1.8V 또는 3.3V 공급 레일을 제공할 수 있다. 하지만 과거에는 그러한 여러 공급 레일 지원으로 인해 저전력 소비 및 최소 설계 실장 면적에 대한 요구 사항을 충족하지 못했다. 다중 출력 PMIC를 사용할 수 있게 되면서 설계자가 전반적인 요구 사항을 충족하면서 다중 레일 장치를 쉽게 지원할 수 있다.
전력 관리
배터리로 구동되는 설계의 경우 공급 전압을 전달하는 기존의 기술이 적절하지 않을 수 있다. 예를 들어 주로 다른 전압 레일을 제공하는 데 사용된 선형 조정기는 단일 셀 리튬 이온 배터리의 정격 3.6V 출력을 저전압 MCU에 필요한 낮은 레벨로 변환할 때 많은 양의 전력을 낭비한다. 여러 개의 별도 공급 레벨을 지원해야 할 경우 전력 소비, 부품 수 및 복잡성을 가중할 뿐이다. 이와 반대로 Maxim Integrated의 MAX77650은 다중 레일, 배터리로 구동되는 설계에 완벽한 전력 관리 솔루션을 제공한다.
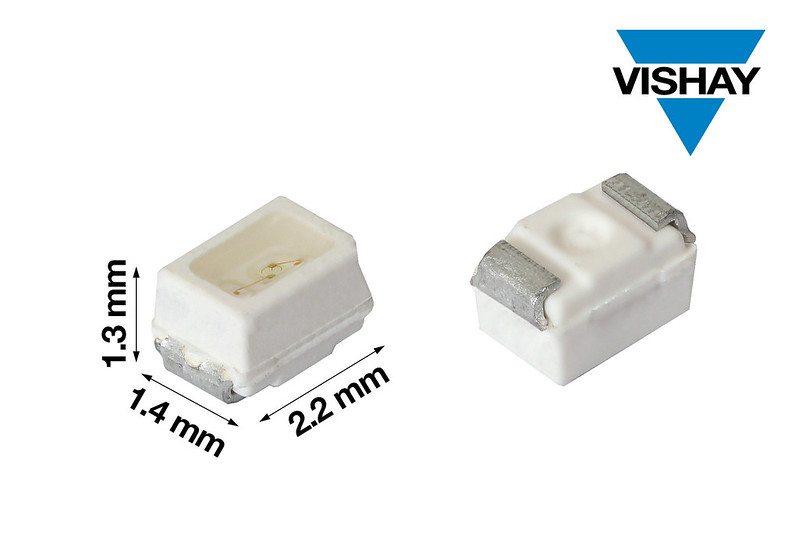
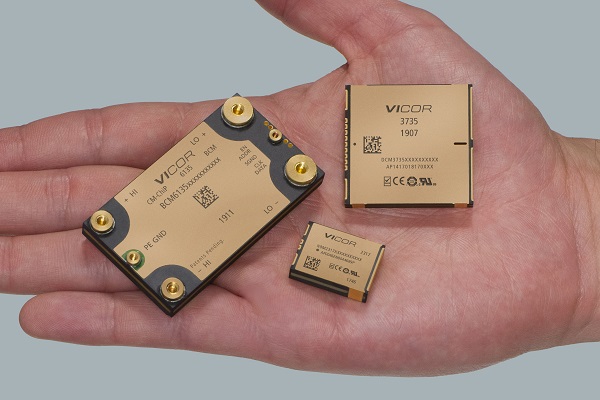
MAX77650의 전력 관리 아키텍처는 단일 인덕터, 다중 출력(SIMO) 벅 부스트 조정기와 낮은 드롭아웃(LDO) 조정기를 결합한다(그림 4). Maxim Integrated는 특수 휴대용 설계에 사용된 적외선 LED와 같은 장치를 지원하기 위해 250mA에서 425mA로 프로그래밍 가능한 전류 싱크 드라이버뿐만 아니라 이 아키텍처를 여러 GPIO로 확장하는 옵션을 제공한다.
이 PMIC 아키텍처의 중심에서 SIMO 조정기는 한 개의 외부 인덕터가 Darwin MCU 및 다른 장치에 필요한 여러 공급 레일을 전달하는 데 필요한 게이팅 메커니즘을 구현한다. SIMO 조정기에서 제어 회로망은 별도로 게이트된 출력을 통해 단일 인덕터를 방전시킨다(그림 4, 위). 작동 시 SIMO 조정기는 각 출력에 대해 순차적으로 인덕터의 충전을 높여(그림 4, 아래) 각 출력의 프로그래밍 가능한 제어를 실현한다.
-4")
[그림 4] MAX77650에 사용된 단일 인덕터 다중 출력(SIMO) 벅 부스트 조정기는 개별 출력 핀으로 출력을 게이팅하고(위) 순차적으로 다음 출력을 위해 인덕터 충전을 높이는 데(아래) 단일 인덕터면 충분하다. (이미지 출처: Maxim Integrated)
예상 배터리 충전
눈에 보이지 않는 인텔리전스를 배터리로 구동되는 제품에 구축하기 위한 설계 퍼즐의 마지막 조각은 바로 배터리 자체이다. 이 설계에서 남은 배터리 용량의 정확한 추정치는, 다른 장점에도 불구하고 전체 제품에 사용자가 실망하는 직접적인 계기가 되는 예기치 못한 전력 차단을 방지하는 데 매우 중요하다.
MAX77650과 같은 PMIC는 충전 절차가 중요하지만 스마트 제품은 사용자에게 배터리 충전 또는 교체가 필요한 시기를 알리기 위해 신뢰할 수 있는 추정치가 필요하다. 기존의 연료계 장치가 이 역할을 오랫동안 맡아왔지만 정확도가 낮고 전력 소비가 높아 기대치를 거의 충족하지 못했다.
Maxim Integrated MAX17048 및 MAX17055와 같은 고급 연료계 IC는 배터리 충전 상태(SOC)에 대한 정확한 예측을 그대로 유지하면서 개발자에게 전력 및 복잡성에 대한 설계 목표를 충족하는 데 유연성을 제공한다.
과거에는 SOC를 측정하는 기본적인 방법을 개방 회로 전압(OCV) 측정 또는 쿨롬 계수에 의존했다. 별도로 사용되는 각각의 방법은 상당한 트레이드 오프를 가져왔다. OCV 측정값은 배터리 전류에 큰 영향을 받는다. 쿨롬 계수는 단기간에 양호한 정확도를 제공하지만 시간이 지남에 따라 정확도가 감소한다. 각 방법은 설계 레벨에서 다른 절충안을 제공한다. OCV를 측정하려면 보정 표를 작성하기 위해 어느 정도의 배터리 특성이 필요한지 알아야 하며 쿨롬 계수를 사용하려면 배터리의 전류 흐름을 측정할 추가 저항기가 필요하다.
Maxim의 연료계 IC는 이러한 방법을 모두 개선한다. MAX17048은 예상법으로 OCV 기술을 확장하는 Maxim의 ModelGauge 알고리즘을 구현한다. OCV를 기반으로 한 다른 방법과 마찬가지로 MAX17048은 추가 전류 감지 저항기가 필요하지 않는다. 장치에 사전 로드된 배터리 모듈이 포함되어 있지만 개발자가 최적의 정확성을 위해 배터리 특성을 정의해야 할 수 있다. 그럼에도 불구하고 이 장치는 전력 예산이 아주 빠듯한 설계에 적합하다. 정상 작동 중에는 장치가 저전력 ‘최대 절전 모드’로 3μA만 소비한다. 이 모드에서 장치가 정확한 SOC 예측을 계속 제공하지만 활성 모드에서 업데이트 속도를 250ms(밀리초)마다 45초 간격으로 늦춘다.
모든 OCV 기반의 방법과 마찬가지로 SOC 예측은 과도한 부하 상태 및 기타 요인에 따라 유지된다. Maxim Integrated는 MAX17055를 통해 ModelGauge m5 알고리즘을 제공한다. 이 알고리즘은 OCV 방법을 사용하여 쿨롬 계수에서 장기 드리프트를 수정한다(그림 5).
-5")
[그림 5] Maxim MAX17055와 같은 고급 연료계 IC는 개방 회로 전압(OCV)와 쿨롬 계수법을 결합하여 배터리 전체 수명 주기에 정확한 결과를 제공한다. (이미지 출처: Maxim Integrated)
MAX17055는 이 방법으로 정확한 연료계에 외부 Rsense 저항기 및 일부 커패시터를 제공한다(그림 6). 이 장치는 MAX17048과 마찬가지로 기능 손실 없이 전력 소비를 7μA로 줄이는 최대 절전 모드를 제공한다. 이 경우 최대 절전 모드는 전체 활성 모드에서 175.8초가 아닌 5.625초마다 업데이트된다.
-6")
[그림 6] 개발자는 Maxim MAX17055, 외부 감지 저항기 및 일부 커패시터를 사용하여 아주 정확한 배터리 연료계를 구현할 수 있다. (이미지 출처: Maxim Integrated)
다른 ModelGauge m5 연료계 옵션은 실장 면적에 영향을 거의 주지 않는(MAX17055의 2.115mm2에 비해 2.132mm2) Rsense 저항기를 비슷한 9핀 WLP(웨이퍼 레벨 패키지)에 통합한다. Rsense 통합 옵션은 동일한 5.6초 업데이트 속도를 제공하지만 최대 절전 모드에서 전류 소비를 5.2μA로 줄인다.
외부 Rsense 부품이 필요하지만 MAX77650 PMIC 및 단일 인덕터와 함께 MAX17055 연료계 IC를 사용하면 공간 효율적인 설계를 제공한다(그림 7). Maxim Integrated는 MAX32620 기반 MAX32620FTHR 개발 보드에서 이 조합을 전력 서브 시스템 설계로 사용한다.
-7")
[그림 7] 조합 방식으로 사용되는 Maxim MAX77650 PMIC 및 MAX17055 연료계 IC는 PMIC의 단일 인덕터(L1), 연료계 Rsense 저항기(R14), Murata Electronics의 NCP15XH103F03RC NTC 서미스터, 저항기 및 커패시터만 필요한 간단한 설계에 복잡한 전력 서브 시스템을 제공한다. (이미지 출처: Maxim Integrated)
보드에는 MCU, PMIC 및 연료계 장치와 함께 PMIC의 단일 인덕터(L1), 연료계 Rsense 저항기(R14), Murata Electronics의 NCP15XH103F03RC NTC 서미스터, 저항기 및 커패시터만 필요하다. 이 제품은 0.9인치 x 2.0인치의 실장 면적에 12핀 소켓 커넥터 2개, RGB LED 2개 및 푸시 버튼 2개를 제공한다. 개발자는 해당 마이크로 USB 커넥터를 통해 보드에 전력을 공급할 수 있고 또는 2mm 커넥터를 통해 배터리를 연결할 수 있다.
결론
스마트 제품에 대한 사용자의 기대치를 충족하기 위해 배터리로 구동되는 장치는 외관 및 가용성에 있어 기존 제품에 더 근접하게 설계되어야 한다. 설계자가 이러한 제약 조건을 충족시키려면 보다 지능형 제품을 만드는 데 필요한 성능을 저하시키지 않고 전력 소비와 설계 실장 면적을 최소화해야 한다.
개발자는 Maxim Integrated Darwin MCU, SIMO PMIC 및 고급 연료계 IC를 사용하여 사용자에게 친숙한 형태와 기능으로 정교한 기능을 제공하는 설계를 통해 상충되는 요구 사항을 충족할 수 있다.




™ 전원 솔루션.jpg)

 |






 |
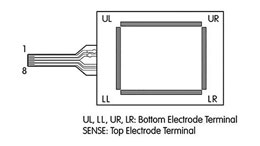
안정적인 터치스크린을 빠르게 구현하는 방법
조회수 138회 / Steven Keeping
Bluetooth 5.3을 Edge IoT 설계에 빠르고 비용 효율적으로 추가하는 방법
조회수 370회 /

적절한 안전 컨트롤러 선택의 복잡성 해결
조회수 95회 / Jeff Shepard
반도체 자동화 테스트 장비에 SSR을 사용하는 방법
조회수 102회 / Jens Wallmann
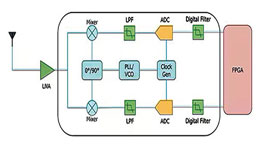
항공 우주 및 방위 산업의 적응형 SDR 통신 시스템에서 민첩한 RF 트랜...
조회수 362회 / Stephen Evanczuk
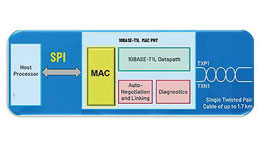
10BASE-T1L을 통한 건물 자동화 혁신
조회수 195회 / Rolf Horn

다기능 전원 공급 장치를 사용하여 지능형 화재 안전 및 보안 시스템 신...
조회수 337회 / Art Pini

전력 소자 구동기의 선택 및 시작하는 방법
조회수 553회 / Bill Schweber
DSC와 MCU를 사용하여 내장형 시스템 보안을 보장하는 방법
조회수 560회 / Stephen Evanczuk
PDF 다운로드
 |
회원 정보 수정