2024 우수잡지


-SiC Renewables-KR 466x58H.JPG)

설계 전에 고려해야 할 로봇의 전력 아키텍처

자료제공/바이코 코퍼레이션 기술부
-1")
전력 공급 네트워크 혁신은 경쟁 우위를 창출한다
모바일 로봇 산업이 빠르게 성장하고 발전하고 있다. 2023년까지 시장 규모는 거의 300억 달러[World Robotics 2020]에 이를 것으로 전망되는 가운데 가까운 미래에 생산되는 로봇은 현재 잘 알려져 있거나 아직 발견되지 않은 문제들을 해결함으로써 다양한 시장을 공략하게 될 것이다. 로봇은 이미 A 지점에서 B 지점으로 움직이는 것 이상을 수행한다. 이들은 환경 입력과 임무 파라미터를 바탕으로 실시간 결정을 내린다.
-2")
전력 공급 네트워크는 전력 밀도가 높고 확장 가능하다
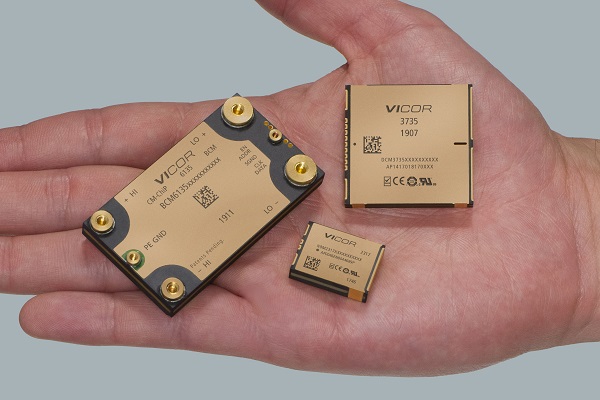
DCM 컨버터 시리즈는 43 ~ 154V 입력에서 동작하기 때문에 이와 같은 종류의 요구에 적합하다. DCM3623은 서보 드라이브, 기타 페이로드 및 다운스트림 컨버터를 위해 배터리로부터 레귤레이션된 24 또는 48V를 분배할 수 있다. DCM3623은 36 x 23 x 7.3mm 패키지에서 90% 효율로 240W 전력을 공급한다. 24 ~ 48V로 설정된 레일로 일반적으로 ZVS 벅 또는 벅-부스트 레귤레이터를 사용하여 더 낮은 전압 레일에 전력을 공급할 수 있다.
이러한 기능을 제공하기 위해 모터, 센서 및 프로세싱 서브시스템이 필요하지만, 경쟁에 앞서 나가기 위해 더 나은 옵션을 사용함에 따라 로봇의 플랫폼은 이러한 컴포넌트를 빠르게 업그레이드할 수 있어야 한다. 크기, 무게, 비용 목표를 유지하면서 빠른 업그레이드를 수행하기 위해 변화하는 요구사항에 맞춰 확장 가능한 최적화된 전력 공급 네트워크(PDN)가 필요하다. 아래의 질문은 플랫폼에 가장 적합한 해답에 도달하도록 도와줄 것이다. 이러한 과정을 통해 임무 파라미터가 발전하면서, 회사가 직면할 모든 변화에 대처할 수 있는 모바일 로봇을 위한 보다 나은 PDN을 설계할 수 있게 될 것이다.
1. 배터리가 가벼운 저손실 전력 분배에 최적화되어 있는가?
배터리의 경제성(비용, 공급, 수명 주기)과 수명(사이클 수, 노화)에 대해 걱정하지만, 사용하는 전압이 설계의 전체 무게에 영향을 미친다는 사실에 대해서는 고려한 적이 있는가?
옴의 법칙에 의해 고전압과 저전류에서 전력을 분배하면 더 작은 (그리고 더 가벼운!) 케이블이 필요하므로 케이블 무게를 줄일 수 있다는 것은 간단한 사실이다. 케이블이 더 작고 가벼울수록 큰 크기에 비해 저항이 더 작으므로 시스템에서 낭비되는 열의 양이 줄어든다. 이러한 이유로 상대적으로 낮은 12V 솔루션에 비해 48V에 기반한 (그리고 더 높은!) 배터리 전력 아키텍처가 많이 있으며, 고정비 BCM 및 레귤레이션을 제공하는 DCM 컨버터를 모두 포함하여 효율적이고 가벼운 컨버터를 사용할 수 있다.
2. PDN이 현재와 미래의 페이로드 사이의 시간에 최적화되어 있는가?
플랫폼은 진화한다. 확장되는 기능과 함께 프로세서는 더 빨라지고, 모터와 액추에이터는 더 많아지며, 센서 어레이는 더 많은 전력을 필요로 한다. 서브시스템을 교체할 때마다 PDN을 재설계하기를 원하는가?
PDN을 재설계하는 대신 동일한 PDN 소스 전압에서 더 많은 에너지를 저장할 수 있도록 추가적인 셀을 병렬로 사용하여 전체 배터리 용량을 증가시킬 수 있다. 이제 다른 전압으로 재설계하거나, 그러한 변경으로 인해 플랫폼 전체에 미치는 영향을 처리해야 할 필요가 없다. 미래를 대비해 PDN을 최적화하려면 서브시스템에 전력을 공급해야 할 때 고정비 컨버터를 사용할 수 있게 하는 방전 프로파일과 함께 최소 48V의 높은 배터리 분배 전압을 선택한다. 고정비 컨버터는 스텝다운 변환을 위한 가장 효율적이고 가장 작은 크기의 가장 가벼운 컨버터이다. PDN은 가령 48를 12V로 또는 800V에서 SELV 전압으로 변환해야 할 때마다 이러한 작은 모듈식 컨버터를 배치할 수 있다.
3. 동적 부하가 시스템에 불필요한 무게를 추가하는가?
동적 부하에 전력을 공급하기 위한 브루트 포스 방법은 최대 부하 전력에 대한 PDN의 분배 크기를 결정하지만, 부하가 낮은 듀티 사이클을 갖는 경우 요구를 만족하기 위해 대형 케이블에 의해 상당한 무게가 추가된다. 대형 케이블 대신, 필요할 때 전력을 공급할 수 있는 가까운 커패시터를 사용하여 부하 지점 근처에 로컬 에너지 스토리지를 추가하는 방법이 대안이 될 수 있다. 그러나 PDN을 최적화하는 더 나은 선택으로 고정비 컨버터가 있다. 이들 컨버터는 이상적인 트랜스포머처럼 동작할 수 있으며 입력에서 출력으로 정전용량을 반영하는 이점이 있다(출력에서 입력으로도 동작). 이는 입력의 정전용량이 마치 컨버터의 변환 K 계수와 동일한 비율로 조정된 출력 정전용량인 것처럼 나타난다는 것을 의미한다. 가장 가벼운 솔루션은 컨버터와 함께 훨씬 큰 커패시터를 사용하는 대신 고정비 컨버터의 입력에 작은 용량성 값을 사용한다.
딸기, 사과, 상추를 비롯한 다양한 농산물이 시각 인식 로봇과 함께 자동화된 차량 안내 시스템을 사용하여 심고 관리되고 수확되고 있다. 대형 로봇 차량 또는 장비는 일반적으로 400V 이상의 고전압 DC 소스에서 전력을 공급받는다.
-3")
4. 자율 제어를 계획해야 하는가?
작업 자동화는 효율 향상에 필수적이므로 로봇이 현재 인간의 통제를 받더라도 일부 인간이 통제하는 작업은 미래에 자동화될 가능성이 높다. 현재의 기계 학습/인공 지능 하드웨어를 볼 때 전력 요구가 쉽지 않지만, Vicor 솔루션은 이미 이러한 요구사항을 만족한다. 지금 일부 추가적인 전력 기능을 계획한다면(2번 참조!) AI를 향상된 기능에 통합할 준비가 되었을 때 쉽게 확장할 수 있다.
센서, 자율성, 모빌리티 및 딥 러닝을 가능하게 하는 AI의 발전으로 검사 로봇이 파이프라인 내부나 저장 탱크와 같은 위험하거나 밀폐된 공간에서 인간을 대체하고 있다.
-4")
5. 배터리 vs. 테더링?
공장, 창고 또는 일정한 구역과 같이 특히 한정된 운영 영역에서 테더링 설계가 갖는 이점을 과소평가하지 않도록 한다. 실제로 조종되거나 자율적인 로봇은 모두 작은 직경의 케이블에서 킬로와트의 전력을 공급할 수 있는 테더링 전력 시스템을 사용하고 있다. 아래의 그래프에서 보듯이 더 높은 전압은 동일한 크기(및 무게)의 케이블에서 더 많은 전력을 공급할 수 있다.
-5")
테더링은 무한한 동작 시간을 허용하므로 플랫폼에서 더 광범위한 기능(센서, 데이터 수집 등)을 지원할 필요가 있을 때 전압을 (400V, 800V 또는 더 높게) 증가시켜 더 많은 전력을 공급할 수 있다. 이렇게 하면 케이블을 가볍게 유지할 수 있다. 이와 같은 가벼운 컨버터는 여전히 더 많은 이점을 제공한다는 사실을 잊지 않도록 한다(앞의 1번 및 3번 참조).
-6")
일부 모바일 로봇은 테더링 케이블을 통해 기지국에 연결할 필요가 있다. 수중 검사와 같은 애플리케이션에서 테더링을 사용하면 잡음이 많고 열악한 환경에서 오랜 시간 동작하며 카메라에서 고대역폭 데이터 전송이 가능하다. 케이블이 얇고 가벼울수록 로봇은 더 먼 곳에서 더 오래 동작할 수 있지만, 얇은 케이블은 기존 PDN에서 전력이 공급되는 것을 제한한다. Vicor의 모듈식 방법은 케이블을 통해 더 높은 전압을 전달할 수 있어 전력 손상 없이 케이블 크기와 무게를 줄일 수 있다. Vicor 모듈은 작은 크기와 적은 무게로 로봇을 더 가볍게 만들고 로봇의 탑재하중을 증가시킬 수 있다.
6. 모듈화가 가치를 더하는가?
공통 인터페이스는 기계적인 부분, 데이터 인터페이스 및 전력을 표준화하여 모듈화를 가능하게 한다. 시스템의 FRU 수준에서 모듈성을 제공하면 현장의 유지보수성이 향상된다. 그러나 어느 시점에서 시스템에 포함하려는 기능보다 인터페이스가 뒤처질 수 있다. 예를 들어 12V는 수십 년 동안 컴퓨팅 및 자동차 PDN에서 표준 분배 전압이었지만, 이제는 전력 수준이 상승함에 따라 48V가 대중화되고 있다. 모듈화의 가치를 확장하기 위해 인터페이스를 유지하면서 PDN에서 효율적인 변환이 가능한 컨버터를 사용할 수 있다. 48V에서 12V로 변환하는 예로 돌아가면, NBM2317은 양방향 고효율 변환으로 12V와 48V를 연결하는 제품의 좋은 예이다.
첫 번째 파워트레인 아키텍처는 PRM 전력 모듈, 고성능 벅-부스트 레귤레이터를 특징으로 한다. PRM은 96 ~ 98% 효율로 24V ~ 48V의 중간 버스를 생성하여 서보 및 고정비 NBM, ZVS 벅 및 ZVS 벅-부스트 레귤레이터를 포함하여 추가적인 다운스트림 모듈에 전력을 공급한다. 또한 모든 모듈을 병렬로 연결하여 더 높은 전력 변환을 제공할 수 있다.
전력을 공급하는 더 좋은 방법
여기에 제시된 6가지 질문은 다음과 같은 PDN을 설계하는 길로 안내한다.
• 열과 질량의 영향을 최소화하여 전력 분배 달성
• 열을 분산시켜 쿨링 용이
• 확장 가능한 배터리 용량으로 PDN에 의존하는 배터리 전압에서 탈피
• PDN 확장성 제공(전력, 기능, 자율 제어)
• 공통 인터페이스를 사용하여 모듈화를 지원함으로써 향후 기능 확장 가능
로봇 기능을 최적화하는 모듈식 전력 컴포넌트를 사용하여 Vicor가 모바일 로봇에 전력을 공급하는 방법에 대한 자세한 내용을 알아보세요.






 |






 |

전동화 트렌드를 주도하는 소형 전원 모듈
조회수 565회 / 바이코

MOSA, SOSA 및 VPX 개방형 아키텍처를 사용하는 표준 국방 플랫폼의 미래
조회수 4601회 / Matt Renola

전원 컨버터가 어떻게 로보틱스 혁신에 기여하는가?
조회수 1276회 / Maurizio Di Paolo Emilio

로봇 혁명을 촉진하는 바이코의 전력변환 혁신
조회수 1234회 / Vicor Corporation

고밀도 모듈식 전력 시스템을 위한 PCB 레이아웃 및 열 설계
조회수 1444회 / Joe Aguilar

항공우주 및 방위산업용 전력에 대한 FAQ
조회수 1406회 / Matt Renola

전력 소모가 급증하는 컴퓨팅 어플리케이션 솔루션
조회수 1317회 / Robert Gendron

로봇 혁명을 이끌 전력 변환 기술의 획기적 발전
조회수 1586회 / 바이코

모바일 로봇 성능 최적화
조회수 1436회 / Anna Giasson 외 1인
PDF 다운로드
 |
회원 정보 수정