2024 우수잡지


-MPLAB Software Updates-KR 466x58H.jpg)


컨베이어 걸림에 대한 오경보 방지로 공장 자동화 생산성 향상

글/Steven Keeping, 기술 저널리스트
빠르게 움직이는 컨베이어는 생산 속도를 높이고 효율성을 향상하기 위해 공장 자동화 분야에서 폭넓게 사용되고 있다. 하지만 때때로 문제가 발생하기도 한다. 흔히 발생하는 문제 중 하나는 걸림 현상이다. 한 물품의 진행이 막히는 경우, 그 뒤로 다른 물품들이 빠르게 쌓이게 된다. 이러한 걸림 현상은 작업 처리 속도를 낮추고 컨베이어 시스템에 손상을 줄 뿐만 아니라 주변의 작업자에게도 위험할 수 있다.
레이저 감지기는 이러한 걸림 현상을 해결하기 위한 솔루션 중 하나이다. 센서가 컨베이어에 전체적으로 레이저 빔을 비추고 그 반사를 감지하여, 걸려있는 물품을 확인하고 손상이 발생하기 전에 시스템을 정지시킬 수 있다. 레이저 감지기의 설치와 사용은 간단하지만 그것이 완벽하지는 않다. 예를 들어 여러 물품의 이동 중 물품 사이에 간격이 없는 경우, 시스템은 걸림 현상이 있다고 잘못 판단하여 컨베이어를 불필요하게 정지시킬 수 있다.
최근 출시된 레이저 센서 제품은 더욱 발전된 광학 기술과 소프트웨어 알고리즘을 활용하여 잘못된 경보 횟수를 감소시킨다.
이 기사에서는 걸림 현상 감지에 사용되는 두 가지 유형의 광센서인 LED와 레이저에 대해 간략하게 소개한다. 그런 다음 ToF(Time-of-Flight) 레이저에 중점을 두고 센서의 성능을 결정하는 핵심 요소를 살펴본다. 또한 이 기사에서는 Banner Engineering에서 제공하는 실생활에 사용되는 ToF 레이저 센서를 소개하고, 컨베이어 걸림 감지 응용 제품을 위해 센서를 설정하는 방법도 설명한다.
레이저 센서란 무엇인가?
레이저 센서는 가간섭성 광선을 사용하여 물체를 감지하고 거리를 파악하는 데 도움을 준다. 물체가 없는 경우 빛은 고정된 기준 표면에서 반사된다. 그러나 물체가 빔을 가로지르면, 빛이 다른 강도로 더 짧은 거리에서 반사되어 센서가 활성화된다. LED 센서도 빛을 사용하여 물체의 존재를 감지할 수 있고 가격이 더 저렴한 편이지만, 최근 몇 년간 두 센서 간의 가격 차이가 줄어들었고 여러 기술적인 측면에서 레이저 센서가 더 우월하다.
예를 들어, 레이저 유형은 LED 센서에 비해 감지 범위가 훨씬 넓고 감지 정밀도가 높다. 또한 정밀하게 제어되는 레이저 빔은 반사성이 좋지 않은 표면 위에서도 긴 거리의 구간에서 우수한 반사성을 발휘하여 작은 광점을 생성한다. 이러한 특성을 통해 레이저 센서는 미세한 물체, 심지어 가느다란 실오라기 크기의 물체까지도 감지할 수 있다. 또 다른 장점은 레이저 센서는 구멍이나 좁은 틈새를 통해서도 물체를 감지할 수 있다는 점이다(그림 1).
-1")
레이저 센서는 감지된 물체까지의 거리를 결정하기 위해 삼각 측량 또는 빔 ToF라는 두 가지 기술을 사용한다. 삼각 측량 기법은 반사된 빛의 각도를 사용하여 센서로부터 거리를 결정한다. ToF 센서는 그 이름에서 알 수 있듯이 빔이 물체까지 이동하고 돌아오는 데 걸리는 시간을 측정한다. 그런 다음 고정된 빛의 속도(‘c’)를 적용한 다음과 같은 간단한 공식을 사용하여 물체까지의 거리를 계산한다. 물체까지의 거리(m) = ToF 초(s)/2 x c(초당 미터(m/s))(그림 2).
-2")
삼각 측량 기법을 사용하는 레이저 센서는 더 저렴하며, 100mm까지의 짧은 거리에서 보다 정밀하다. ToF 유형은 최대 24m의 장거리 감지에 더 적합하다. 컨베이어 걸림 감지를 위한 응용 제품은 수 미터 이상에 걸쳐 레이저 센서가 작동해야 하므로, 이 기사의 나머지 부분에서는 후자인 ToF 유형에 대해서 살펴보겠다.
레이저 센서의 선택 기준
레이저 센서는 기술적 측면에서 LED 장치보다 우수하지만, 특정 응용 제품에 가장 적합한 센서는 신중하게 선택해야 한다. 고려해야 할 주요 파라미터는 다음과 같다.
• 반복성(또는 재현성): 센서가 동일한 조건에서 동일한 측정값을 얼마나 신뢰성 있게 반복할 수 있는지를 나타낸다. 예를 들어, 0.5mm의 반복성이란 동일한 대상에 대한 여러 측정값이 모두 ±0.5mm 이내라는 것을 의미한다.
• 최소 물체 간격(MOS): 센서가 대상 물체를 신뢰성 있게 감지하기 위해 해당 대상이 주변 배경과 분리되어야 하는 최소 거리를 나타낸다. 0.5mm의 MOS는 센서가 주변 배경으로부터 최소 0.5mm 떨어진 물체를 감지할 수 있음을 의미한다(그림 3).
• 분해능: 센서가 감지할 수 있는 가장 작은 변화의 거리를 측정한 값이다. 0.5mm의 분해능은 센서가 0.5mm까지 변화를 감지할 수 있다는 의미이다. 이 규격은 최적 사례의 반복성과 동일하지만 허용 오차 범위가 아닌 절대 수치로 표현된다.
• 정확도: 이는 실제 값과 측정된 값의 차이이다. 참조 기준이 없는 상태에서 알지 못하는 거리의 측정 정확도를 평가하는 데 사용된다. 이 측정값은 여러 센서의 측정값을 비교할 때 유용하다.
• 선형성: 선형성은 정확도 대신 사용할 수 있는 대체 파라미터로서, 알려진 참조 대상에 대비한 측정값의 상대적인 변화를 파악할 때 사용한다. 이는 아날로그 센서의 4mA 및 20mA 포인트를 보정하는 것과 유사하며, 이 경우 모든 거리 측정은 학습된 조건과 비교되어 계산된다.
레이저 센서 선택의 시작은 응용 제품의 치수 특성에 맞는 기능을 가진 센서를 선택하는 것이다. 예를 들어 감지할 물체가 몇 센티미터 정도로 가까운지, 아니면 몇 미터 정도로 멀리 있는지이다. 하지만 거리 외에도 감지 대상 물체의 색상과 반사도에 따라 세부적인 선택 기준이 있다.
-3")
[그림 3] MOS는 센서가 대상을 정확하게 감지하기 위해 배경과 대상이 분리되어야 하는 최소 거리를 의미한다. (이미지 출처: Banner Engineering)
고난이도 감지 물체를 위해 레이저 센서 최적화하기
레이저 센서는 반사도가 높은 표면을 가진 물체와 어둡거나 무광택 표면을 가진 물체를 감지할 때 자주 어려움을 겪다. 엔지니어는 이에 대처하기 위해 자동 이득 보정 기능을 갖춘 레이저 센서를 선택하여, 레이저 강도를 줄이기 위해 이득을 낮추고 이에 따라 반사광의 강도를 낮추어야 한다. 이득 보정은 정확도를 유지하는 데 도움이 된다. 어둡거나 반사가 잘 되지 않는 물체를 찾을 때는 리턴 신호가 매우 약하여 감지가 어려울 수 있다. 이에 대한 해결책은 자동으로 이득을 높여서 반사 신호를 증폭하는 레이저 센서를 선택하여 타 종류의 센서라면 관찰하기 어려울 수 있는 대상 물체를 정확하게 감지하는 것이다.
대부분의 응용 제품에서는 정확하게 초점을 맞춘 광점이 이상적이다. 예를 들어, 감지 대상이 여러 색상으로 구성된 경우에는 작은 점이 가장 효과적이다. 여러 색상을 가진 제품에서 중 단 한 가지 색상에만 초점을 맞춰 일관되고 정확하게 반사할 수 있다(그림 4, 상단). 작은 광점은 제품 굴곡이 있는 표면의 특정 지점에 초점을 맞추는 데에도 유용하다. 이러한 초점은 작동의 안정성을 다시 한번 보장한다(그림 4, 하단).
-4")
하지만 초점이 정확히 맞춰진 광점의 레이저 센서가 모든 응용 제품에 적용될 수 있는 것은 아니다. 더 크고 더 넓게 퍼진 광점이 더 나은 선택일 경우도 있다. 예를 들어, 거친 표면을 조명하는 큰 점을 사용하면 반사광의 평균을 계산하여 측정값의 신뢰도를 높일 수 있다(그림 5).
-5")
[그림 5] 넓게 퍼진 광점은 높은 영역과 낮은 영역의 반사를 평균화하는 경향이 있으므로 거친 표면에서 더 효과적이다. (이미지 출처: Banner Engineering)
컨베이어 걸림 현상 해소
빠르게 움직이는 공장 컨베이어는 걸림 현상이 발생하기 쉬우며, 특히 커브 구간 중 곡선이 끝나는 부분에서 제품이 빠르게 쌓일 수 있다. 또한 커브 구간에서는 패키지의 대량 흐름 사이에 간격이 거의 없으므로, 기존 방식의 센서로는 걸림을 감지하기 어려우므로 걸림이 발생했다고 잘못 판단되기 쉽다(그림 6).
-6")
잘못 인지된 걸림에 대한 흔한 우회 방법은 이 문제를 해결하기보다 더 많은 문제를 일으키는 경우가 많다. 통상적인 해결 방법 중 하나는 지연 타이머를 추가하여 잘못 인지된 걸림이 ‘해제될’ 시간을 주는 것이다. 이러한 지연 타이머는 효과가 있을 수 있지만, 더 심각한 걸림이 발생하는 경우 대응이 늦어지고 더 많은 패키지가 쌓여 컨베이어 부품에 스트레스를 주면서 장비가 과도하게 마모될 수 있다. 또한 걸림 때문에 생기는 힘으로 인해 컨베이어에 갇힌 물품이 손상될 수도 있다. 마지막으로, 극심한 걸림 현상이 일어나면 작업자들이 소위 걸림 해소용 막대기(잼 폴)를 사용하여 걸림을 해결하려는 경우가 많다. 이는 대형 전기 모터가 계속 작동하는 동안 작업자가 위험 구역에 접근해야 하기 때문에 위험할 수 있다.
잘못 인지된 걸림 현상은 자주 일어난다. Banner Engineering은 기존의 감지 기법으로 발견한 컨베이어 걸림의 82%가 오경보임을 확인한 한 고객을 예로 들었다. 오경보는 손상의 원인이 되고 직원에게 위험을 초래할 뿐만 아니라, 비용을 발생시킨다. 여기에는 다음 비용이 포함된다.
• 생산성 손실
• 컨베이어 하부 공정의 작업량 저하
• 유지보수 담당자가 허위 오경보 문제를 진단하는 데 소모하는 시간적 손실
• 반복적인 정지 및 시동으로 인한 컨베이어 시스템의 마모 및 손상
이런 엔지니어링 문제에 대한 해결책은 잘못 인지된 걸림 감지를 최소화하면서도 실제 막힘에 대해 빠르게 반응하는 레이저 센서이다. 한 가지 옵션은 Banner Engineering의 Q5X ToF 센서 라인의 Q5XKLAF10000 -Q8이다(그림 7). 이 센서는 50mm ~ 10m 범위에서 작동하며, ±0.5mm ~ 10mm의 반복성, 1mm ~ 70mm의 MOS, 1mm ~ 30mm의 분해능, ±5mm ~ 150mm의 선형성, ±3mm ~ 150mm의 정확도를 제공한다. 이 레이저 센서는 자동 이득 보정 기능과 3, 5, 15, 25 또는 50밀리초(ms) 중 사용자가 선택할 수 있는 응답 시간도 제공한다.
컨베이어 응용 분야에 특히 적합한 Q5XKLAF10000 -Q8은 다음과 같은 기타 주요 특징이 있다.
• 패키지 흐름을 감지하기 위해 간격에 의존하지 않는 내장형 걸림 감지 알고리즘
• 박스, 병, 플라스틱 백 등 다양한 패키지 유형을 감지하는 기능
• 산업 표준 M12 커넥터
• 다양한 실장용 브라켓
-7")
[그림 7] Q5XKLAF10000-Q8 레이저 센서는 대상 물체의 흐름을 감지하기 위해 간격에 의존하지 않는 걸림 감지 알고리즘이 내장된 콤팩트한 컨베이어 걸림 감지기이다. (이미지 출처: Banner Engineering)
레이저 광학 센서 설치
위에서 설명되었던 컨베이어 커브 구간 응용 제품의 경우, 가장 빠른 걸림 감지를 위해 Q5X 레이저 센서가 커브 구간 바로 뒤에 실장되어야 한다. 이 장치에는 2개의 출력 표시기, 디스플레이, 3개의 버튼이 있으며, 최상의 감지 신뢰성과 MOS 성능을 보장하려면 브라켓에 실장되어야 한다. 권장되는 방향은 그림 8에 표시되어 있다. 그런 다음 그림 9와 같이 레이저 센서를 연결한다.
-8")
-9")
방향이 지정되고 전원이 켜지면 레이저 센서를 기준 표면에 비추어야 한다. 기준 표면은 센서 빔을 통과하는 물체가 없을 때 컨베이어 또는 기타 고정 설치 장치가 빛을 반사하는 부분을 말한다. 최적의 기준 표면을 선택하는 것은 레이저 센서의 종합적인 성능 보장에 핵심 요소이다. 무광택 표면 또는 분산된 표면 마감이 있어야 하며, 기름, 물 또는 먼지가 없어야 하고, 영구적인 위치에 있어야 하며, 진동이 없어야 한다. 표면은 또한 최소 200mm와 최대 감지 범위 사이에 있어야 한다. 감지 대상 물품은 센서에 최대한 가깝게, 참조 표면에서 최대한 멀게 통과하는 것이 좋다.
Q5X 레이저 센서는 버튼과 디스플레이를 사용하여 프로그래밍할 수 있다. 메뉴에 들어가 기능적 파라미터에 대한 값을 입력하는 방식으로 프로그래밍이 이루어진다. 예를 들어, 주요 파라미터는 ‘이중 모드’이며, 이 모드는 기준 표면으로부터 수신된 빛의 거리와 양을 기록한다. 그런 다음 센서는 감지된 거리나 반사되는 빛의 양이 변할 때 센서와 기준 표면 사이를 통과하는 물체를 기록한다.
프로그래밍이 필요한 또 다른 중요한 파라미터는 ‘걸림 역반사’이다. 이는 주변 배경이 있을 때 걸림 감지를 극대화하는 이중 모드의 확장 기능이다. 독립적 걸림 범위 값이 설정되어 ‘걸림 상태 아님’으로 판정하는 데 필요한 최소한의 물체 움직임을 정의하며, 이 값은 자동으로 결정된 강도 임계값과 결합하여 물체가 움직이고 있음을 결정한다. 이와 유사한 ‘학습’ 모드를 통해, 주변 배경이 없을 때 걸림 감지를 최적화한다.
결론
생산성을 유지하고 작업자의 안전을 보장하기 위해서는 공장 자동화 컨베이어가 지속적으로 작동하는 것이 중요하다. 하지만 우수한 생산 라인에서도 걸림 현상이 발생할 수 있다. 그러나 이러한 걸림을 감지하는 데 사용되는 기존의 접근 방식은 오경보를 유발하는 경우가 많다. 앞서 살펴본 바와 같이, Banner Engineering과 같은 기업의 최신 레이저 센서는 잘못된 감지를 최소화하는 고급 기능을 갖추고 있으며, 설치와 프로그래밍이 비교적 쉬워 최적의 성능을 발휘한다.






 |






 |

재생 가능 에너지를 배터리에 공급하기
조회수 58회 / Bill Schweber
자율 주행 차량의 LiDAR용 GaN FET
조회수 128회 / Kenton Williston
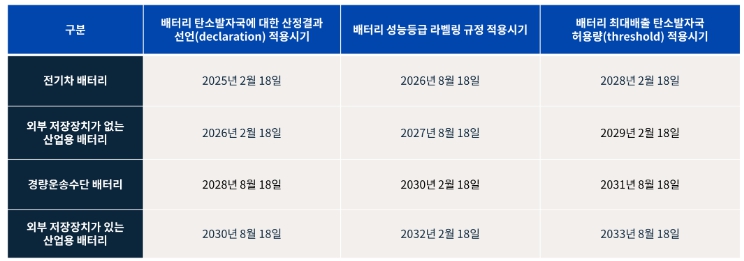
EU 배터리 규정(EU BATTERY REGULATION)이란?
조회수 115회 / TUV
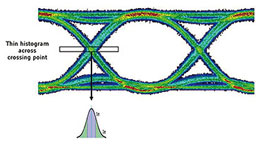
지터가 고속 링크에 미치는 영향
조회수 109회 / Bill Schweber
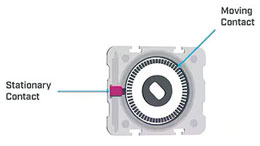
패널 실장 인코더 - 기본 사항 이해
조회수 346회 / Jeff Smoot
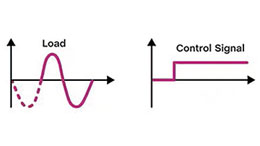
전기 기계 계전기와 무접점 계전기 비교
조회수 300회 / Jeff Smoot
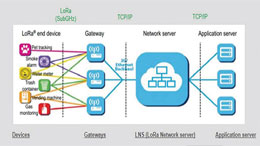
인증된 LoRaWAN 모듈을 사용하여 장거리 연결 개발 가속화
조회수 323회 / Stephen Evanczuk

다양한 응용 제품을 위한 스위치 솔루션
조회수 235회 / Ryan Smoot
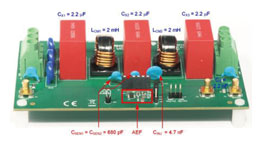
독립형 능동 EMI 필터 IC가 공통 모드 필터 크기를 줄이는 방법
조회수 330회 / 티모시 헤가티
PDF 다운로드
 |
회원 정보 수정